Mark your calendars for our free Foxglove webinar next Wednesday (September 6, 10AM PST)!
Learn how hundreds of robotics companies are using Foxglove to streamline development and accelerate time to market.
To kick things off, Foxglove CEO Adrian Macneil will walk through his experience heading infrastructure at Cruise, and how the gaps he saw in the field's tooling led to him founding Foxglove. We'll end with a live demo of the Foxglove platform, and demonstrate a few use cases for your daily development and debugging workflows.
Register here, and join us online on Sep 6 (10AM PST)!
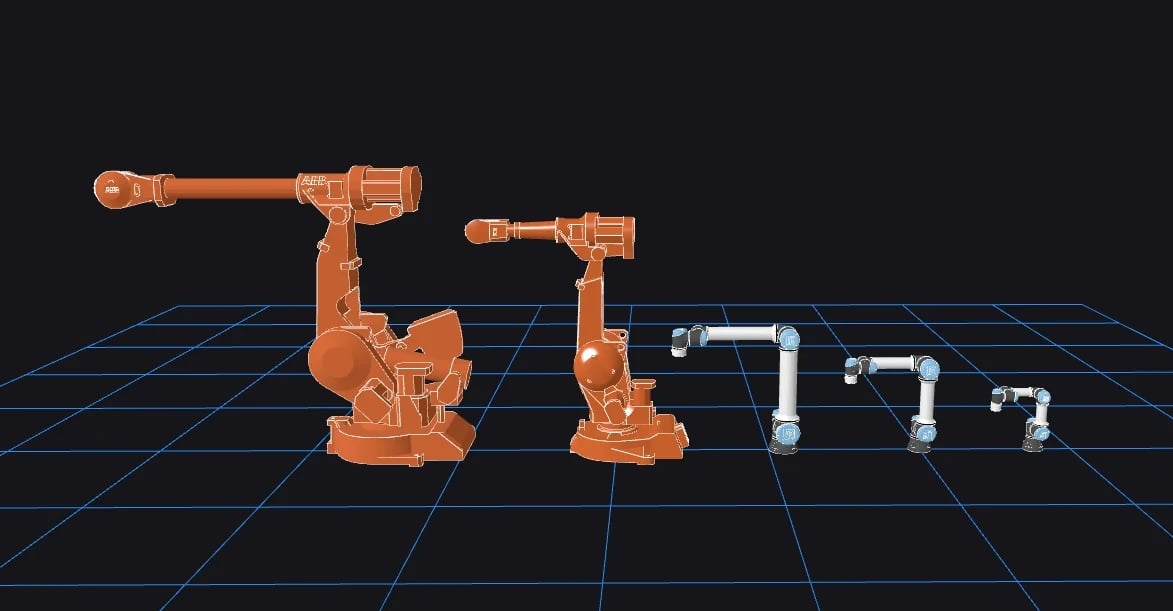
🦾 Improved URDF support in the 3D panel
Foxglove now offers improved support for visualizing robot models described by the Unified Robot Description Format (URDF) in the 3D panel.
Check out our blog post for more information on how to fetch remote meshes, use additional URDF sources, and visualize collision geometries
🫢 Expanded OMGIDL schema support
Foxglove has added support for extensible DDS-types in XCDR2 messages using OMG IDL schemas.
Thanks in part to the Foxglove team’s contributions, the ROS 2 Iron Irwini release will allow you to programmatically fetch type descriptions from remote topics at runtime.
This means you can connect robotics developer tooling – like Foxglove Studio – to your live ROS 2 stack and more reliably playback data files for visualization and debugging.
Questions? Requests? Hit reply and let us know what's on your mind!
To learn more about how Foxglove can take your team from prototype to production, book a demo with our team. To get live support from the wider Foxglove community, join our Slack.
Share our newsletter with colleagues and friends on social media!
Foxglove, 548 Market St #21536, San Francisco, CA 94104